
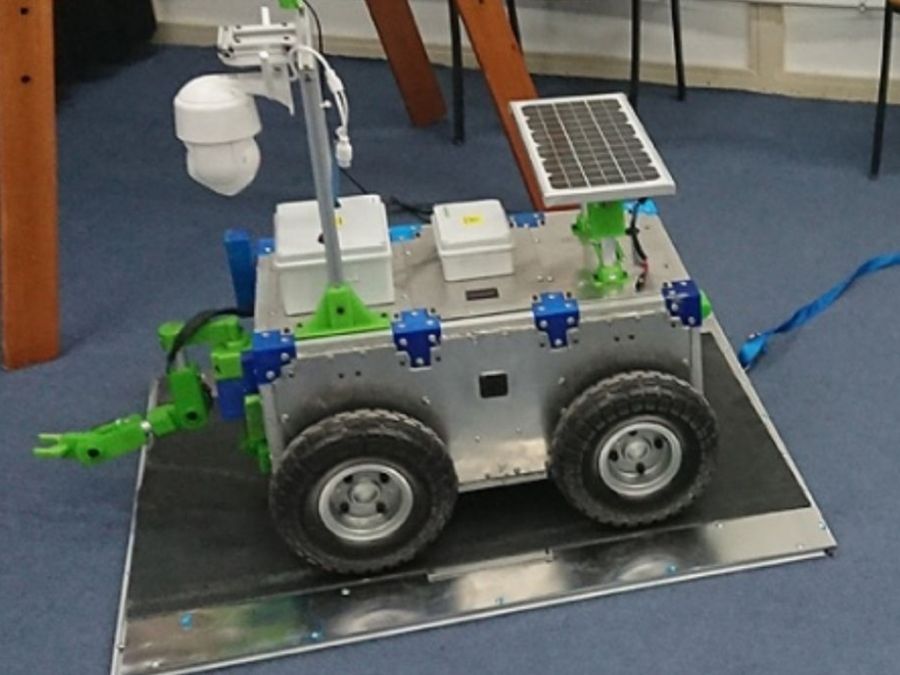
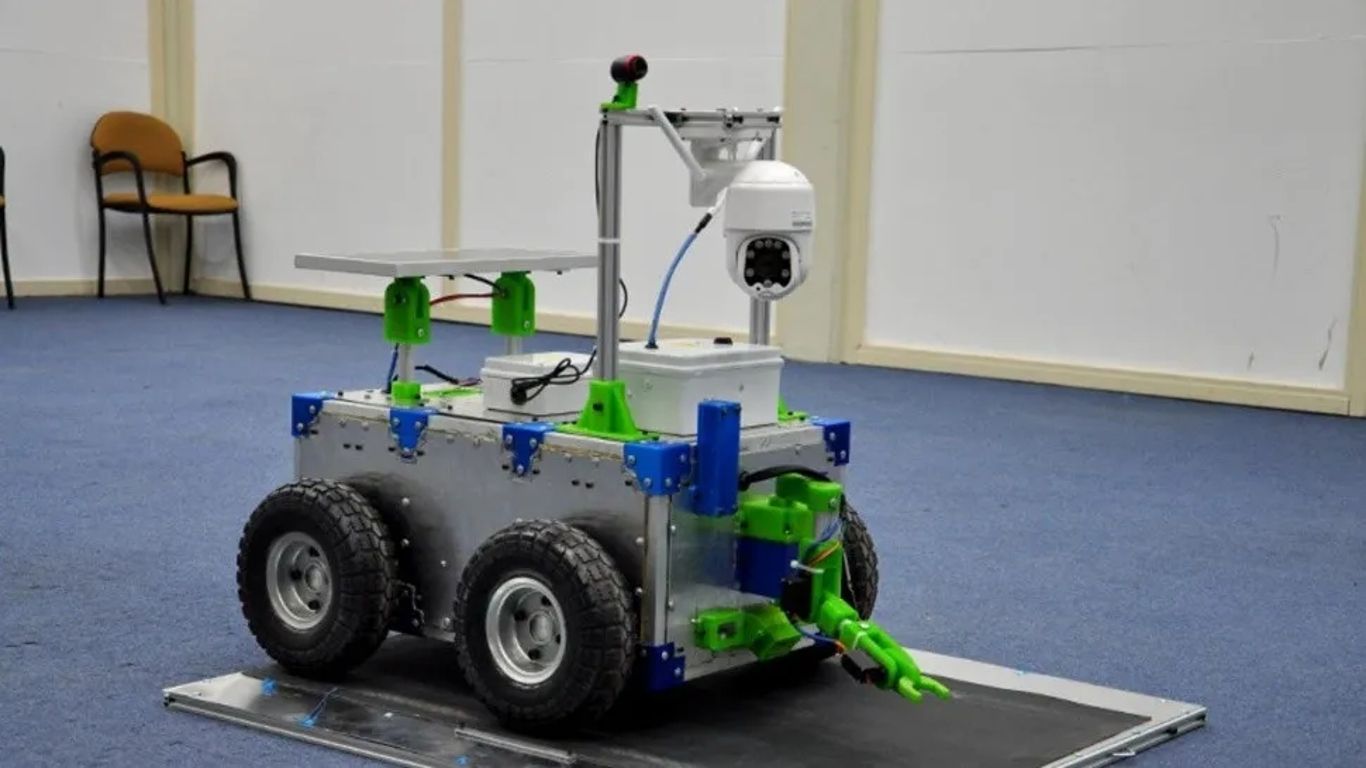
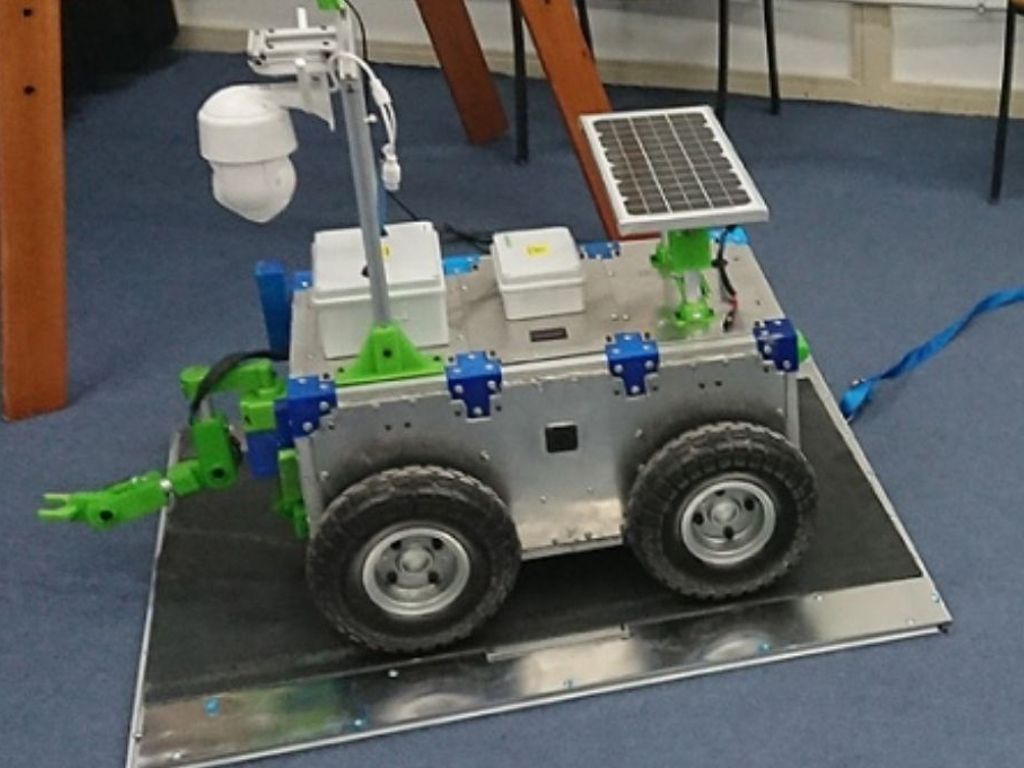
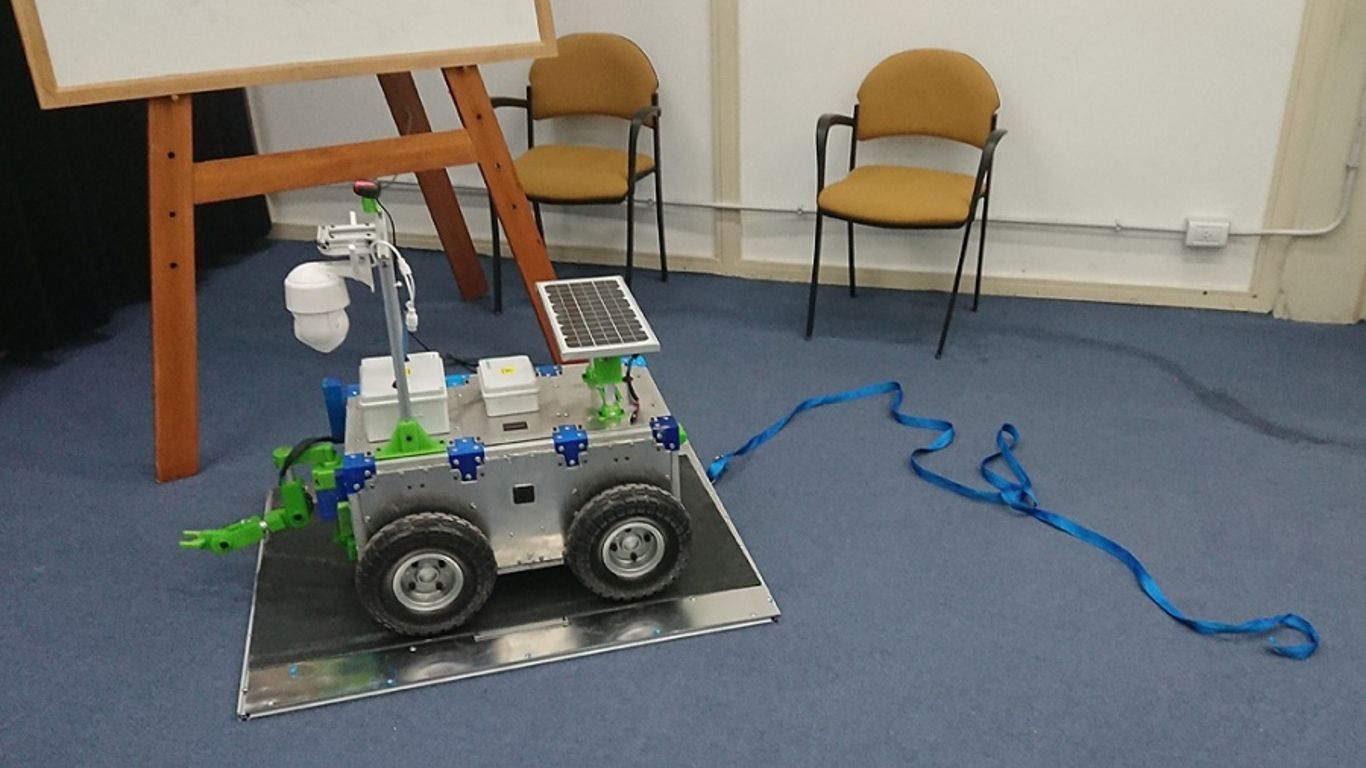
Una plataforma robótica impulsada por cuatro ruedas de tracción controlada, y especialmente equipada con cámaras, sensores, un brazo, paneles solares y wi-fi, acaba de cumplir de manera exitosa con la primera etapa de reconocimiento del terreno y las condiciones climáticas en el glaciar Bahía del Diablo de la isla Vega, ubicado a 60 kilómetros al norte de la Base Vicecomodoro Gustavo Marambio, la principal estación científica y militar permanente de la Argentina y una de las más importantes de toda la Antártida.

Ideado y creado por el Ingeniero y docente investigador argentino Andrés García, este "Robot de uso científico en el sector antártico"- tal como fue bautizado-, cuenta con dos formas diferentes de navegación: una, por control remoto, mediante un operador, y otra, más avanzada, que posee una inteligencia de navegación donde, mediante una aplicación de celular desarrollada específicamente para este robot, se le pueden cargar puntos geo-referenciales- (latitud y longitud), de los lugares a visitar.

“Estoy sorprendido porque funcionó perfectamente. Incluso, llegó integro todo el sistema electrónico”, comentó, al diario Clarín, el científico que se desempeña como docente de la materia Sistema de Control Aplicado a Artillería en la Escuela de Oficiales de la Armada (ESOA), en la base naval de Puerto Belgrano, Punta Alta, provincia de Buenos Aires.

”De todas maneras, la idea es cambiar y mejorarle algunas cosas”, agregó García, quien, entre su vasto currículum científico también cuenta con un doctorado en Control de Sistemas.

Para trasladarse en diversas direcciones, el robot posee un giro diferencial por el cual, mediante la tracción de dos ruedas hacia un lado y dos hacia el otro a distintas velocidades, efectúa el giro para corregir su rumbo.
“En cada actualización on line del GPS analiza el punto donde estaba, el punto donde está y el punto a donde tiene que ir, triangula la posición y corrige el rumbo”, agregó el científico argentino.

Este robot ciento por ciento argento también cuenta con sensores capaces de detectar obstáculos o pozos, que le permiten detenerse y recalcular las posibilidades de avanzar, con muchas piezas que fueron fabricadas en 3D y con baterías especiales para trabajar a muy bajas temperaturas, que pueden cargarse mediante un panel solar incorporado, con alternativas de carga mediante una toma de 220v y otra de 12v.
Además, posee dos cámaras: una, que le permite realizar grabaciones tanto de audio como de imagen de manera diurna o nocturna mientras el robot se desplaza, en tanto que la segunda cámara, mucho más compleja en su funcionamiento, está conectada a una red neuronal y a un software mediante el cual puede cargársele datos para que la cámara realice todo tipo de búsquedas, y, cuando detecta el objetivo cargado, lo pueda filmar o fotografiar.

Ahora, García y su equipo de colaboradores construirán la caja contenedora que permitirá transportar al robot durante la próxima Campaña Antártica de Verano, donde será probado por personal de la ESOA y del Instituto Antártico Argentino durante 21 días.
Galería de imágenes

























Comentarios